
- Title
- Scale-Equivariant Object Perception for Autonomous Driving
- Date
- 2024.07.16
- Writer
- 기계공학부
- 게시글 내용
-
Scale-Equivariant Object Perception for Autonomous Driving
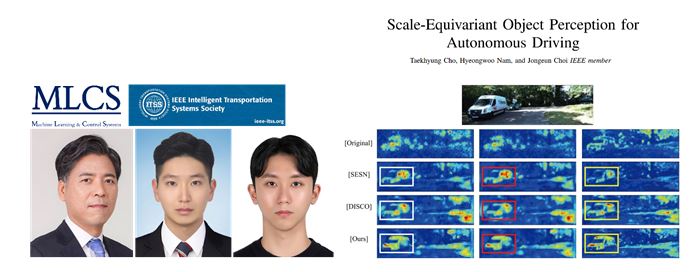
The MLCS research team from the School of Mechanical Engineering, led by Professor Jongeun Choi (co-first authors of this study are Taekhyung Cho and Hyeongwoo Nam), has developed an object detection model using scale-equivariant CNN models to enhance object recognition technology used in autonomous driving. To address the vulnerabilities of traditional CNN models to image rotations, reflections, and scale transformations, a scale-equivariant feature extraction backbone network is developed. When validated on the KITTI dataset, the model demonstrated superior object detection performance compared to other methods. The research findings were published in the renowned international journal 'IEEE Transactions on Intelligent Vehicles' (Impact Factor: 14.0, Ranks in the top 1.3%) in March 2024.
The link: https://ieeexplore.ieee.org/abstract/document/10480255
- Attachments
- 최종은 교수님_썸네일_2.JPG 최종은 교수님_2.JPG